FX5U PID Control : Program and System #Part II
PID Controller / Tuning PID / Heat Process / FX5U / FR-800
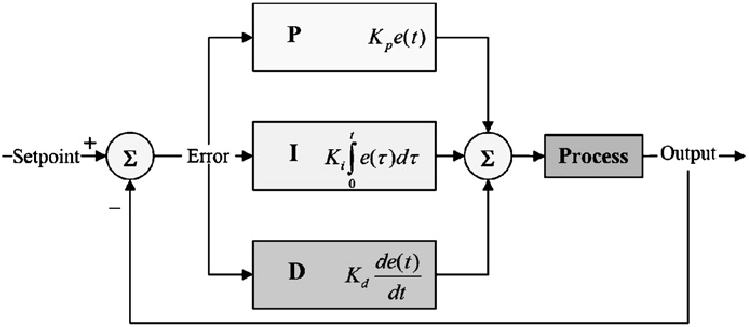
ต่อเนื่องจากเรื่องพื้นฐานการอธิบายระบบควบคุมวงปิด และการใช้งาน FX5U เพื่อการสั่งการ Analog Output ผ่านทาง Built in – Analog output ของตัวมันเองจาก ตอนที่แล้ว ซึ่งเมื่อสามารถสั่งการความถี่ของอินเวอร์เตอร์จากพีแอลซีได้แล้วนั้นขึ้นตอนต่อไปก็คือการทำความเข้าใจค่าพารามิเตอร์หลักๆ ทั้ง 3 ตัวของระบบควบคุมแบบ PID คือ ค่า Kp , Ki , Kd ที่สามารถอธิบายได้ตามแผนภาพแบบวงปิดด้านล่างนี้นะครับ
Source : https://osoyoo.com/2018/08/08/self-balancing-robot-pid-control/
จากภาพที่ 1 จะเห็นว่า ตัว Controller ได้ถูกแยกออกเป็น 3 ส่วน คือ ส่วน Proportional (P) Integral (I) Derivative (D) ซึ่งแต่ละส่วนก็จะมีตัวคูณเป็นของตัวมันเอง Kp ,Ki ,Kd เรียงตามลำดับเลยนะครับ ตัวคูณทั้ง 3 ตัวนี้แหละจะมีผลต่อระบบควบคุมวงปิดอย่างมาก และจะได้เห็นในผลกระทบจากการเปลี่ยนแปลงของค่าตัวคูณพวกนี้ใน GX Works 3 ที VDO ทดลองของเราครับ
เมื่อกล่าวย้อนกลับไปที่ระบบควบคุมวงปิดอีกครั้ง จะมีกราฟ 1 กราฟที่ค่อนข้างคุ้นเคยมากสำหรับนักเรียนไฟฟ้าควบคุมคือ กราฟผลตอบสนองจากระบบที่กำลังควบคุมโดยระบบ PID ซึ่งจะมีรูปร่างหน้าตาดังด้านล่างเลยครับ
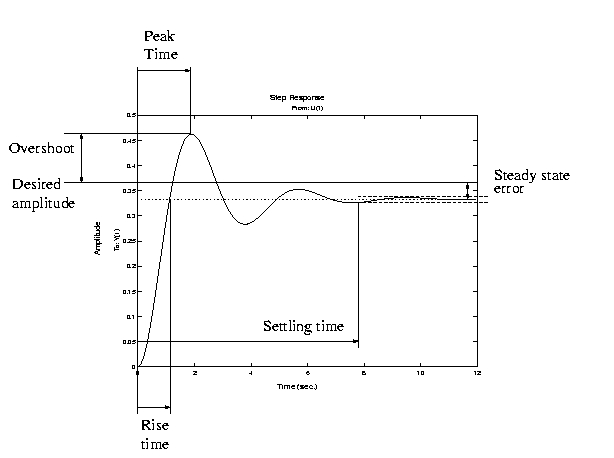
จากการผลตอบสนอง ( Step response ) สามารถแจกรายละเอียดที่น่าสนใจของกราฟได้ดังนี้นะครับ
- Rise Time : ความไวในการเข้าสู่ค่า Reference ของระบบ PID
- Overshoot : ค่าที่เกิน Reference ขึ้นไปสูงสุด
- Settling time : เวลาก่อนเข้าสู่ช่วง Steady State Error
- Steady State Error : ช่วงเวลาที่ระบบควบคุมเข้าใกล้กับค่าที่ตั้งไว้และไม่มีการเปลี่ยนแปลงไปมา
เนื่องจากระบบทางความร้อนส่วนใหญ่ไม่ต้องการความไวในการเข้าสู่ช่วง Sittling Time มากขนาดนั้น และจากทฤษฏีทางด้านระบบควบคุมทำให้เรารู้ว่าสิ่งที่เป็นปัจจัยหลัก ในการเข้าสู่ช่วงเวลา Sittling Time ว่าจะไวหรือช้านั้นเป็นผลจาก Kd ที่ถูกใส่เข้าไปในระบบนั่นเอง ดังนั้นในการทดลองกระบวนการทางความร้อนนี้ เราจะใช้แค่ 2 ค่าในการจูนนะครับ คือ P กับ I (PI Controller) ซึ่งจะสามารถสังเกตุการเปลี่ยนแปลงจาก 2 ค่านี้ได้จากภาพที่ 2 และ ภาพที่ 3 ตามด้านล่างนี้นะครับ
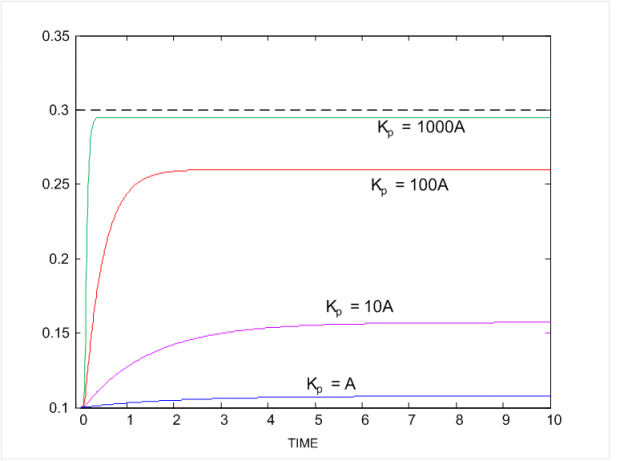
ผลจาก Kp กับระบบควบคุมวงปิด
ผลจาก Kp จะทำให้ระบบเข้าสู่ค่า reference ได้ไวขึ้น มีช่วงเวลา Rise time ที่น้อยลง ระบบจะตอบสนองไวขึ้นถ้าเพิ่มค่านี้ไป แต่ให้ระวังดีๆนะครับ การเพิ่มเยอะกว่าที่ควรจะเป็นจะส่งผลให้ระบบเกิดค่า Overshoot สูงขึ้นตามไปด้วย
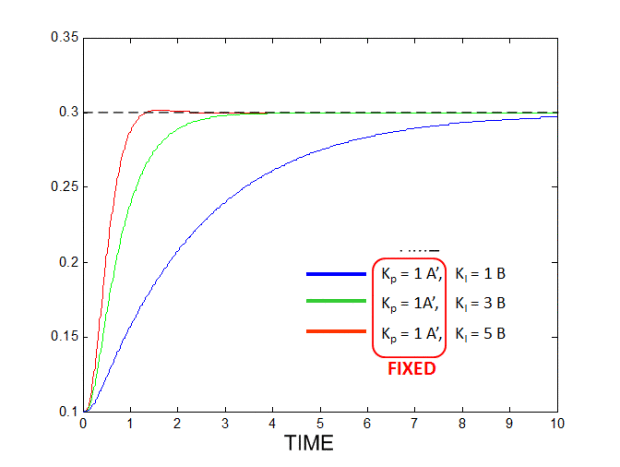
ผลจาก Ki และ Kp กับระบบควบคุมวงปิด
ผลจาก Ki เมื่อทำงานร่วมกับ Kp ก็จะทำให้ระบบเข้าสู่ค่า Reference ได้ไวเหมือนกันและทำให้เกิด Overshoot ได้ค่อนเยอะเหมือนกัน แต่สิ่งที่แตกต่างก็คือ การเพิ่ม Ki เข้าไปสู่ระบบที่มี่ Kp อยู่แล้ว จะทำให้ระบบนั้นๆสามารถเข้าสู่ช่วงเวลาเสถียรภาพได้ ( Steady State ) ซึ่งการใช้ Kp อย่างเดียวไม่สามารถทำได้
เราได้ทำการเขียนโปรแกรมและทดสอบระบบการจูน PI จาก FX5U เพื่อควบคุมระบบความร้อนแบบคร่าวๆ ตาม VDO ด้านล่างนี้นะครับ ลองศึกษารายละเอียดโปรแกรมกันได้เลย
หมายเหตุ ส่วนของ Integral (I) ใน FX5U จะเป็นการปรับค่า Integral Time (Ti) นะครับ
Related Posts



This Post Has 0 Comments