ตู้ควบคุมไฟฟ้า/…

การใช้งานอินเวอร์เตอร์ชไนเดอร์ในโหมด Internal PID
PID CONTROL / SCHNEIDER ELECTRIC / ATV12 / ATV310 / การตั้งค่าพีไอดี
สำหรับพระเอกหลักเลยของการใช้งานอินเวอร์เตอร์ คือการใช้งานในระบบ Booster Pump ซึ่งจำเป็นอย่างมากที่จะเข้าใจระบบ PID Control ที่อาจจะหาได้จากบทความเก่าของเราได้ที่
- http://taradinverter.com/2022/05/04/fx5u-pid-control-program-and-system-part-1/
- http://taradinverter.com/2022/05/06/fx5u-pid-control-program-and-system-part-ii/
ที่จะเป็นการอธิบายระบบทั้งหมดของ PID Closed loop control ซึ่งในที่นี้เราจะไม่ขออธิบายซ้ำกับจุดเดิมนะครับ แต่สิ่งที่จะอธิบายเสริมเข้าไปคือ การมีผลต่อระบบต่างๆในระบบวงปิดนั้นจากพารามิเตอร์หลักทั้ง 3 ตัว ดังต่อไปนี้
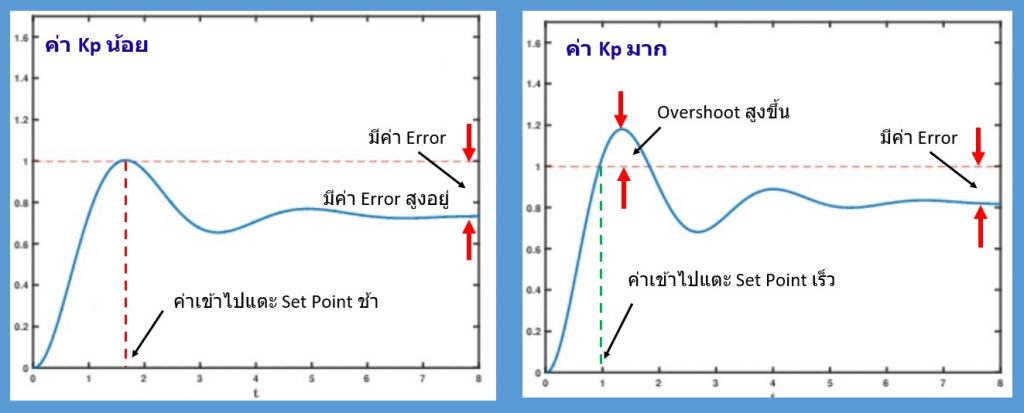
#1 ค่า KP ของ ATV12 Schneider Internal PID
![]() Parameter : rPG : Kp
Parameter : rPG : Kp
ค่า KP จะช่วยให้ค่าเข้าไปแตะ Set point ได้เร็วขึ้น
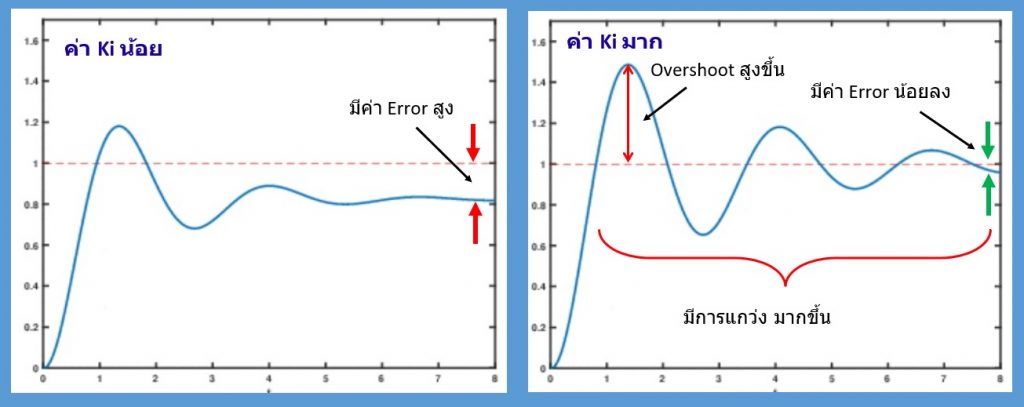
#2 ค่า KI ของ ATV12 Schneider Internal PID
![]() Parameter : rIG : Ki
Parameter : rIG : Ki
ค่า KI จะเข้ามาช่วยค่า Error ที่เกิดจากค่า P ให้น้อยลงได้
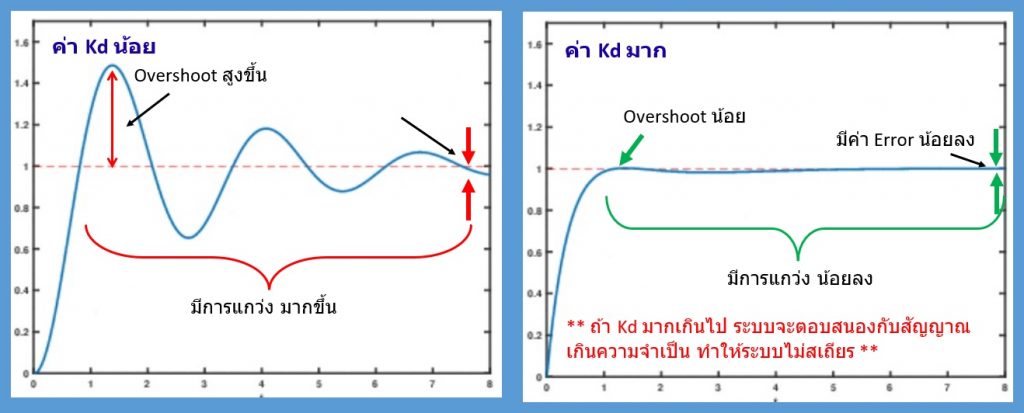
#3 ค่า KD ของ ATV12 Schneider Internal PID
![]() Parameter : rDG : Kd
Parameter : rDG : Kd
ค่า KD ช่วยเรื่องการแกว่งและการเกิด Overshoot ที่เกิดจากค่า I ให้น้อยลง และทำให้ Error ที่บริเวณ Steady state น้อยลง
สำหรับเรื่องการสาธิตการใช้งานสามารถดูได้ที่ VDO ตามที่บังได้ทดลองให้ดูเลยครับ
Related Posts



Comments (0)